Planning is a critical challenge for biological agents that helps them to achieve their goals by recruiting acquired knowledge to design an optimal sequence of actions. It is the hippocampus that is associated with executing planning, in particular spatial planning has been extensively studied. Planning is inherently plagued by uncertainty: the current state (location) of the agent is inferred through environmental cues and future actions is also subject to unknowns of the environment. In the hippocampus neural substrates of simulation of movement trajectories have been identified: in short periods of time, that is associated with a periodic signal called theta activity, future trajectories are played forward from the current location. Machine learning considerations point out that representing and taking into account uncertainty is desirable for optimal planning, however, the way uncertainty is handled in planning remains an unresolved problem.
Alternative representational schemes of uncertainty have recently been proposed in perceptual domains, most notably in vision. We found out that planning in the hippocampus provides a unique opportunity to contrast representational schemes. Thus, we can not only assess if planning in biological systems capitalizes on representing uncertainty, but also how this is achieved. We showed that rats navigate their internal model of the environment, the so called cognitive map, by a sophisticated form of probabilistic planning, stochastic sampling.
Building up an internal model of the environment in the brain is a compelling idea, and studies in perceptual domains have already delivered fascinating results that biological systems exploit the full extent of relying on such internal models: namely using these to perform a highly sophisticated form of computation that is often sidestepped in AI applications as well, probabilistic computations. Here, we show that high-level cognition is also empowered by the ability to perform probabilistic computations: whenever navigating our cognitive map, alternative interpretations and alternative outcomes are weighed according to probability theory.
Relevant publication
Balázs B Ujfalussy, Gergő Orbán (2021)
Sampling motion trajectories during hippocampal theta sequences
biorxiv, doi.org/10.1101/2021.12.14.472575, accepted at fro publication at eLife
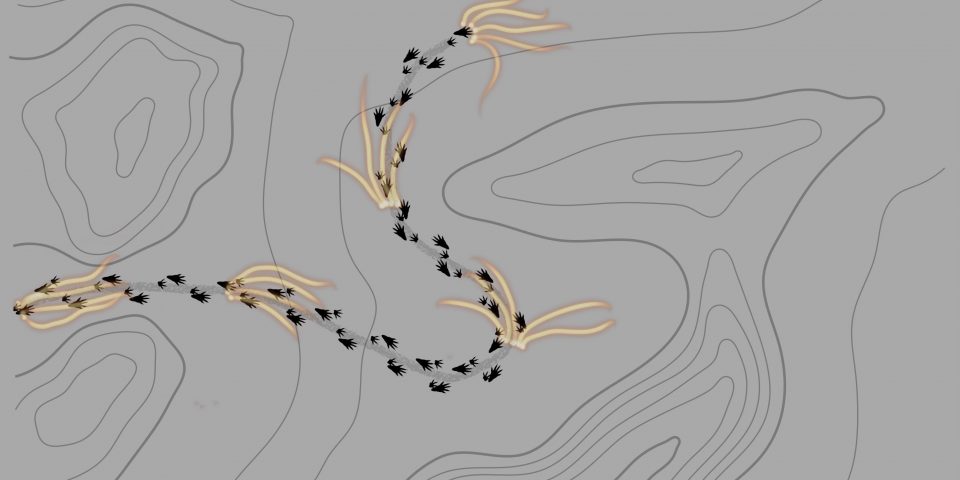
About the figure Rats construct cognitive maps to navigate their environment. Route planning relies on this cognitive map to achieve the goals of the animal. In the hippocampus, short trajectories spanning from recent past to the planned future are rehearsed. Our work has demonstrated that according to the principles of probabilistic computations, uncertainties of current and future states are taken into account and is represented as samples from the distribution of potential trajectories, thus introducing variability in rehearsed trajectories that reflect alternative future routes of the animal.